POC: Hoogprecieze montage van haken op riethouders
Uitdaging
Kunnen we de hoogprecieze positionering en montage van haken op een riethouder automatiseren?
Dit was de centrale vraag van een Proof of Concept (POC) voor Picanol, een wereldleider in de productie van weefmachines. De haak moet met een bout en een M3-moer worden gemonteerd in voorgeboorde gaten in een aluminium frame.
Momenteel wordt deze stap handmatig uitgevoerd. De POC had tot doel de technische haalbaarheid van volledige automatisering te valideren.
Hoogprecieze positionering
De nauwkeurige montage en positionering van deze haken is cruciaal, aangezien een grijper en lans in de volgende processtap met extreem hoge snelheid door de openingen passeren.
Belangrijkste uitdagingen:
- Uiterste precisie: de positionering van de haak, bout en moer moet met hoge nauwkeurigheid worden uitgevoerd.
- Beperkte ruimte: de beschikbare werkruimte voor de robot en tools is zeer krap.
- Strikte cyclustijden: een streeftijd van 10–12 seconden per haak.
- Productvariabiliteit: het systeem moet overweg kunnen met twee verschillende soorten haken.
- Oppervlakte-integriteit: de haken zijn gecoat en mogen tijdens de manipulatie niet beschadigd raken.
-
Kostenefficiëntie: de ontwikkelings- en opstartkosten moesten tot een minimum worden beperkt.
Oplossing
In deze POC moesten drie kritieke stappen worden gevalideerd:
-
Positionering en toevoer van de moeren en bouten: een op maat gemaakte mal (fixture) bleek de oplossing.
-
Positionering van de haken: hiervoor ontwierpen en produceerden we een aangepaste vingergrijper.
-
Klemmen en positioneren van de riethouder: dit proces wordt pneumatisch aangestuurd.
Laten we de technische beslissingen achter elke stap in detail bekijken.
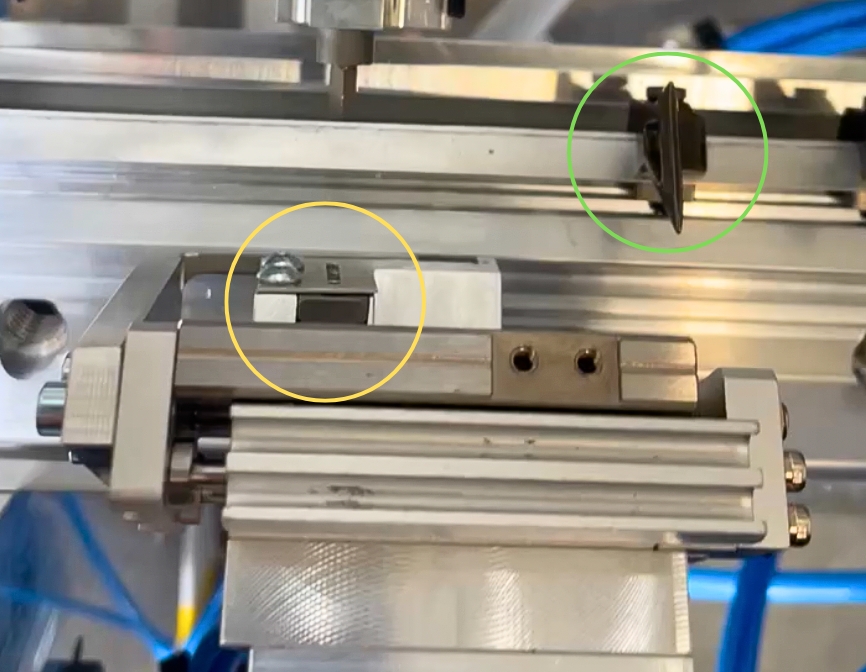
1. Positionering en toevoer van de moeren en bouten
De POC start na de toevoerfase, aangezien toevoersystemen als bewezen technologie worden beschouwd. Onze focus lag op de uitdaging om moeren en bouten zeer nauwkeurig te positioneren en te borgen tegen elke beweging vóór de definitieve fixatie.
De oplossing lag in een custom-built mal. We ontwikkelden een opstelling waarbij de moeren en bouten exact worden geplaatst op de punten waar toekomstige toevoersystemen zullen worden aangesloten. Een pneumatisch gestuurde geleider brengt de moer naar de uiteindelijke bevestigingspositie en houdt deze stevig op zijn plaats tijdens het schroefproces.
Eenmaal gepositioneerd en geborgd, wordt de bout vanaf de zijkant ingedraaid. Voor deze POC werd het schroeven handmatig uitgevoerd, aangezien dit een standaard, bewezen technologie is.
2. Positionering van de haken
Aangezien flex-feeder systemen bewezen technologie zijn, focust de POC zich op het proces vanaf haken in een vaste positie.
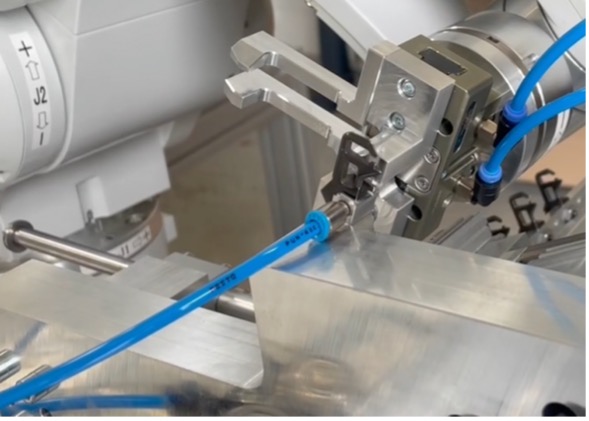
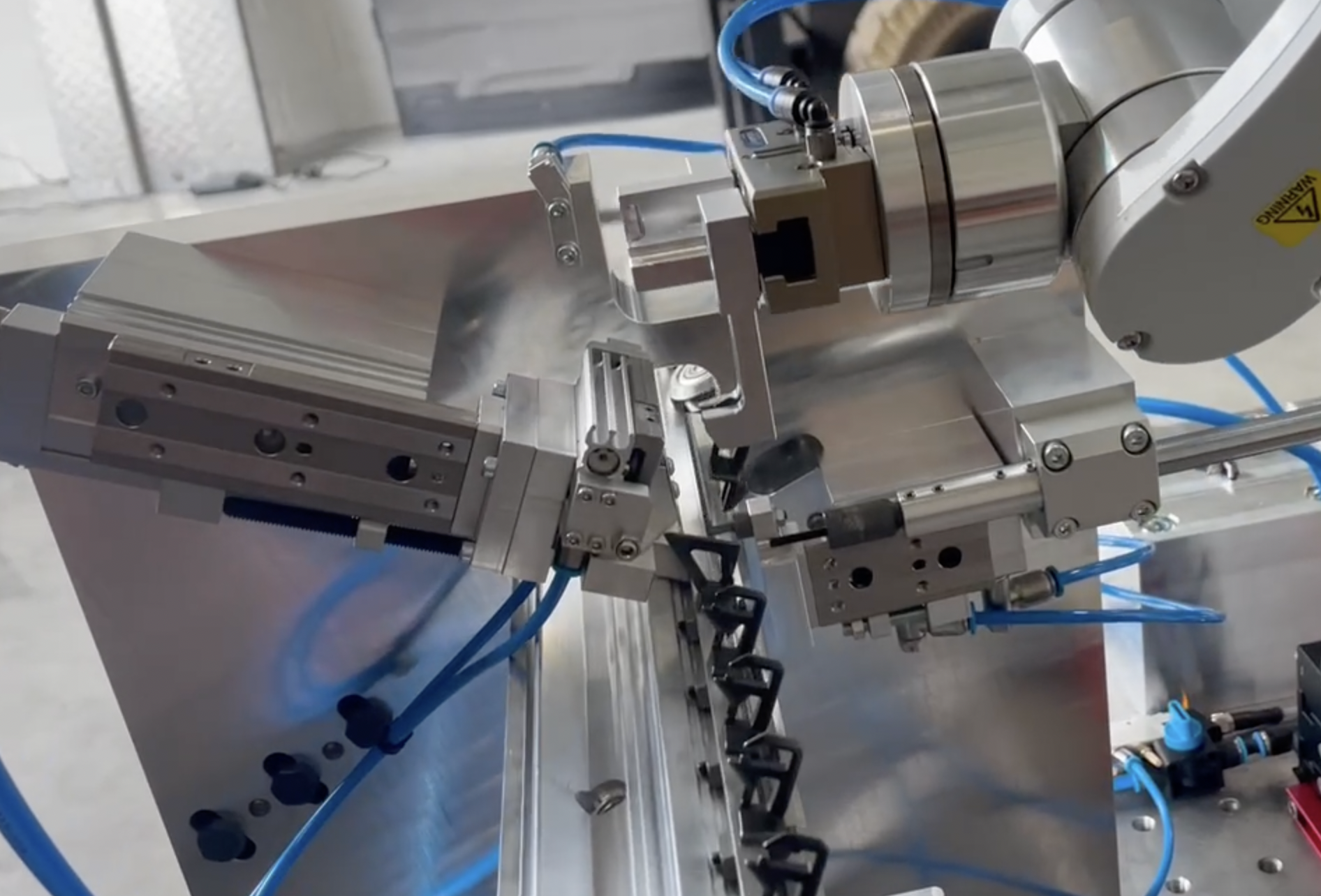
Aanvankelijk worden de haken in een horizontale positie aangeboden. Omdat de robot elke haak van bovenaf met sub-millimeter precisie op de riethouder moet plaatsen, hebben we een pick-and-place proces in twee stappen geïmplementeerd.
We ontwierpen een dubbele vingergrijper en een tussentijds overslagstation. Dit station maakt de heroriëntatie van de haak van een horizontale naar een verticale positie mogelijk. Om te garanderen dat de haak tijdens deze overgang perfect uitgelijnd blijft, integreerden we een vacuümgestuurd fixatieprincipe om de haak stevig op zijn plek te houden.
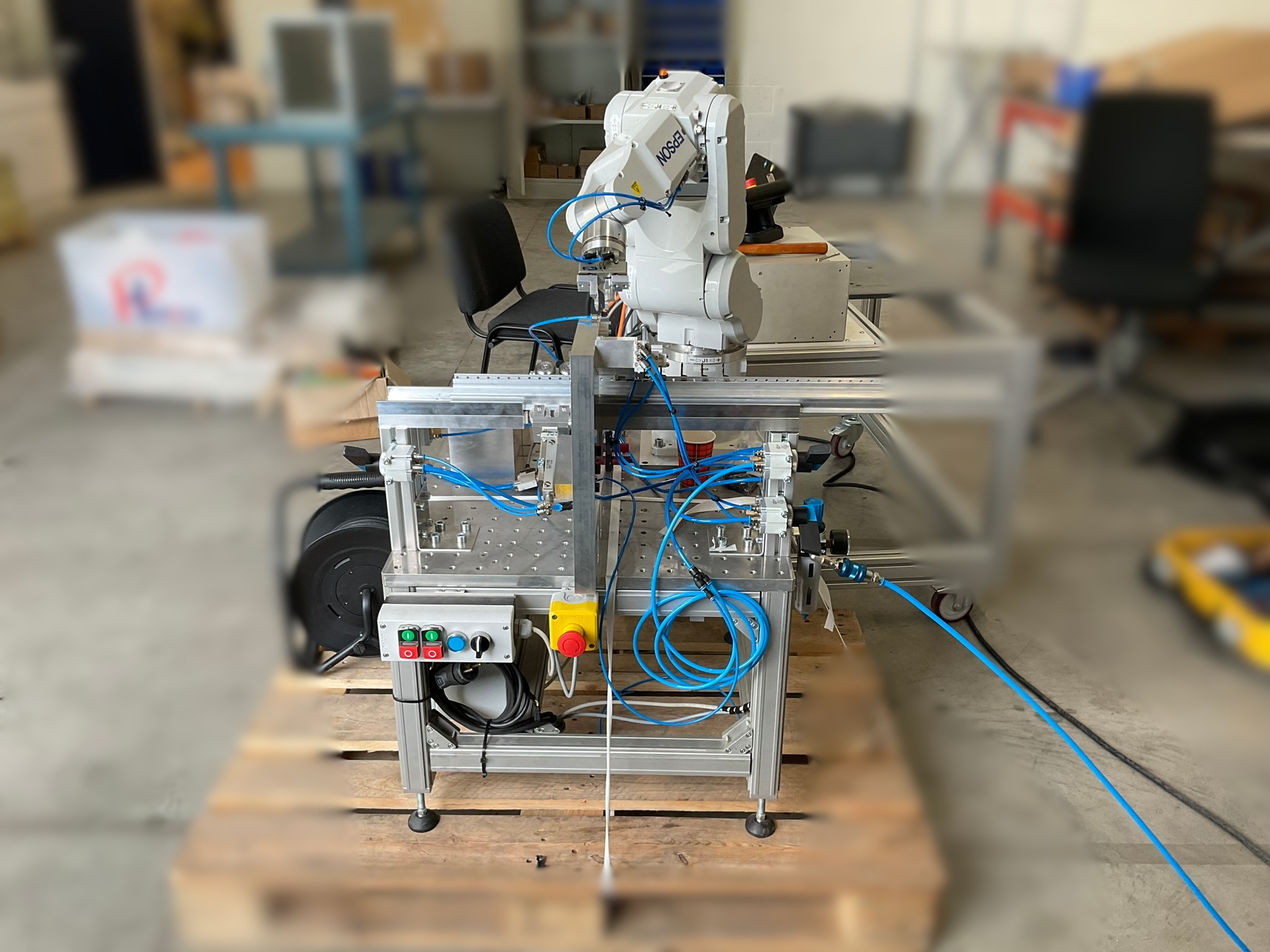
Ten slotte pakt de grijper de verticale haak op en positioneert deze op de riethouder met een herhaalbare nauwkeurigheid binnen het sub-millimeterbereik. Voor deze POC maakten we gebruik van een Epson C4 6-assige robot, die een herhaalnauwkeurigheid van 0,02 mm biedt.
3. Klemmen en positioneren van de riethouder
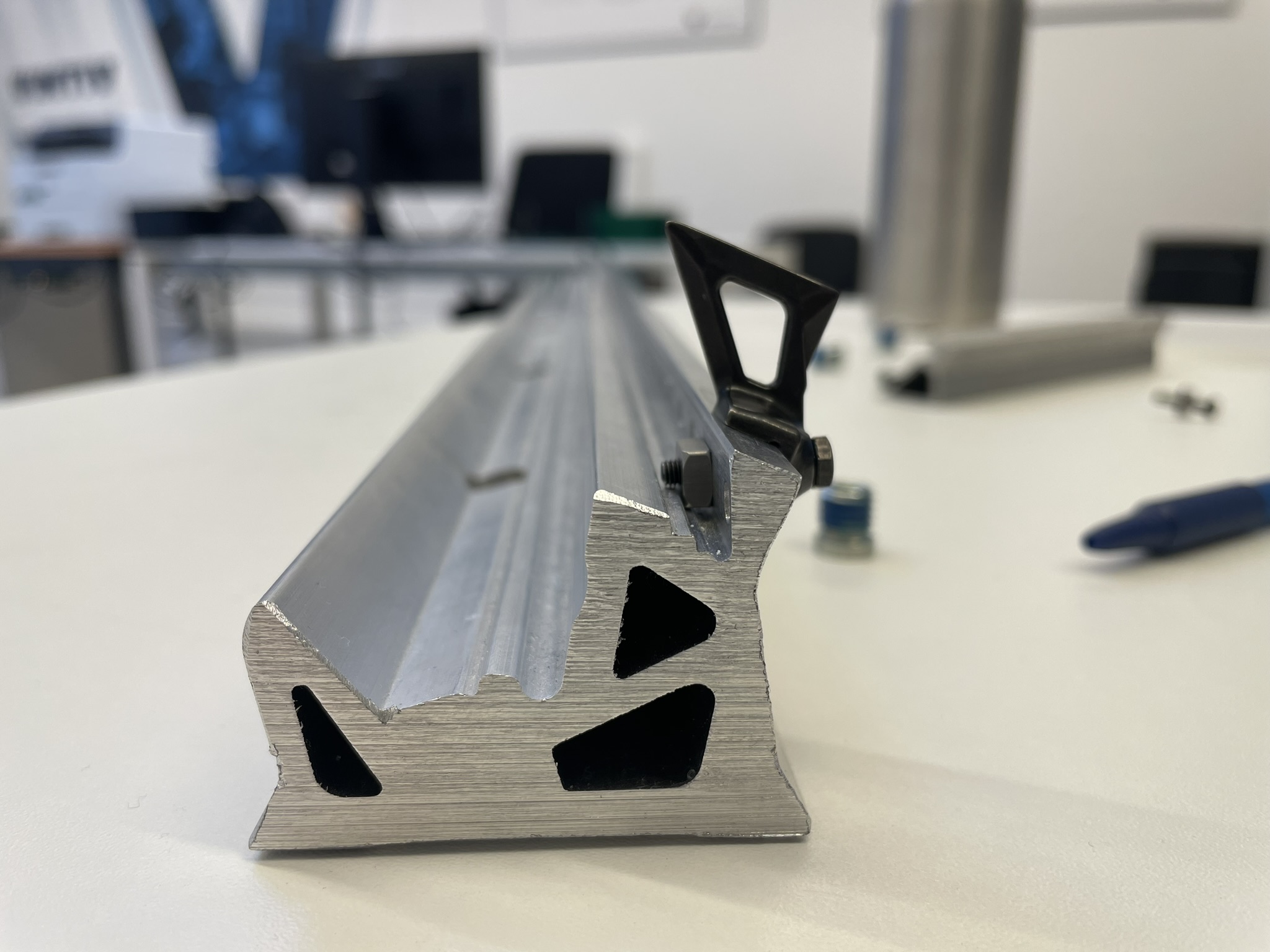
Om de vereiste nauwkeurigheid te behalen, moet de riethouder in een exacte positie worden vergrendeld.
Hiervoor gebruiken we een pneumatisch klemsysteem in combinatie met een positioneringspen (locating pin). Deze pen valt in een vrij boorgat naast de bevestigingspositie, wat zorgt dat de houder perfect uitgelijnd is en onbeweeglijk blijft tijdens het gehele assemblageproces.
Resultaat
We hebben de POC getest en gevalideerd in samenwerking met het Picanol-team tijdens een proef waarbij het systeem succesvol 200 haken heeft gepositioneerd en gemonteerd.
Binnen een beperkt budget zijn we erin geslaagd de technische haalbaarheid van deze automatisering aan te tonen. Dit stelde ons in staat om:
-
Projectrisico’s te mitigeren door potentiële knelpunten in een vroeg stadium te identificeren en op te lossen.
-
Een nauwkeurig budget te bepalen voor de bouw van de definitieve, volledige assemblagelijn.
-
Waardevolle inzichten te verkrijgen om het grijperontwerp verder te optimaliseren voor maximale prestaties.