
Bin picking als antwoord op stijgende volumes in de farma-industrie
Een explosieve vraag naar diagnose- en testkits voor COVID-19 maakt dat farmabedrijven een versnelling hoger moeten schakelen. Het juiste visiesysteem is cruciaal voor bin picking in een sector waar alles draait om uiterste precisie en delicate onderdelen. In dit artikel deelt Pickit hun inzichten en best practices.
Onderdelen automatisch picken uit trays of containers en ze vervolgens aanbieden voor verdere verwerking heeft op vlak van automatisering het grootste potentieel.
In de farma-industrie was het voorheen namelijk moeilijk om dit proces betrouwbaar te automatiseren. Omdat het vaak gaat om delicate onderdelen. Die onderdelen worden typisch door een operator uit een doos gehaald om ze dan op een bepaalde manier aan de robot of machine aan te leveren.
In productiebedrijven, voornamelijk in de zware industrie, is een soortgelijke uitdaging wél geautomatiseerd. Willekeurig verspreide onderdelen in een bak automatisch klaarzetten voor de volgende stap in het proces, gebeurt daar door de robot ogen te geven. Visietechnologie dus. Pickit stuurt de robots aan om onderdelen rechtstreeks te picken uit een bak, tray, doos, pallet of transportband. Om ze dan vervolgens correct aan te leveren aan de machine.
Omschakelen gebeurt met een druk op de knop. In plaats van fysieke ruimte in te nemen om verschillende mallen, klemmen en aanvoerapparaten te stockeren, staan de visie-algoritmen op een PC.

Bin picking is dus ingeburgerd in de zware industrie.
Niet zo in farma.
Net om de redenen die al zijn aangehaald: niet nauwkeurig genoeg, te weinig performant. 3D-visietechnologie inzetten voor pick-and-place robots in de farma- industrie? Niet gebruikelijk.
Recente projecten bewijzen echter het succes van het automatisch detrayen (of retrayen) van farmaceutische producten met behulp van een robot. Een belangrijk deelproces in het maken van medicijnen, is het scheiden van de materialen voor verdere verwerking. Dit proces staat bekend als detrayen of retrayen, en is prima geschikt voor tablet blisters of rechthoekige farmaceutische verpakkingen. Maar het verhaal wordt complexer als het gaat om transparante injectiespuiten, die typisch als bulkgoederen worden aangeleverd in containers of dozen. In dat geval zijn het vaak werknemers die de spuiten handmatig overhevelen naar de trays.
Voor deze applicatie werd echter ons visiesysteem ingezet als een van de bouwstenen voor een beter schaalbaar bin pickingsysteem. Voor deze case resulteerde dat in:
- korte cyclustijden,
- hoge kwaliteitsnormen,
- en een flexibele en gemakkelijke retooling.
Een andere applicatie waarbij robots met visietechnologie werden ingezet, was het manipuleren van medicijnverpakkingen. Hierbij picken de robots de verpakkingen uit grotere containers en plaatsen ze ze in het opslagsysteem.
Deze applicaties bewijzen dat bin picking, ook al is het nieuw voor de farmaceutische industrie, voldoende voordelen heeft. Voor zowel klinische productie (voor R&D- doeleinden) als commerciële productie (voor patiënten).
Hoe werkt het?
Ruisvrije beelden
De HD-camera met gestructureerde verlichting creëert ruisvrije beelden.
Zo schakelen we de factor omgevingslicht uit. Gestructureerd licht is het proces van het projecteren van een bekend patroon (vaak rasters of horizontale balken) op een view. Deze rasters of balken vervormen wanneer ze op een oppervlak vallen. Hierdoor kan het visiesysteem de diepte en de oppervlakte van de objecten berekenen.
Transparante onderdelen detecteren
Transparante onderdelen detecteren met behulp van visietechnologie is een uitdaging. En in de farmaceutische industrie zijn transparante onderdelen onvermijdelijk. Toch is het mogelijk om onderdelen zoals injectiespuiten te identificeren. Dankzij de etiketjes en doppen. Meer hebben onze camera’s en algoritmes niet nodig om het geheel te identificeren.
Kleine kwetsbare onderdelen detecteren
Kleine onderdelen maken bin picking extra complex. Dat is zo in elke industrie. Ons systeem genereert een 2D-beeld van de bin, en door de visualisatie van bovenaf te doen, brengen we overzicht. Het systeem slaagt erin de onderdelen te detecteren zodat de robot ze kan picken.
Voorzichtig handling van delicate onderdelen
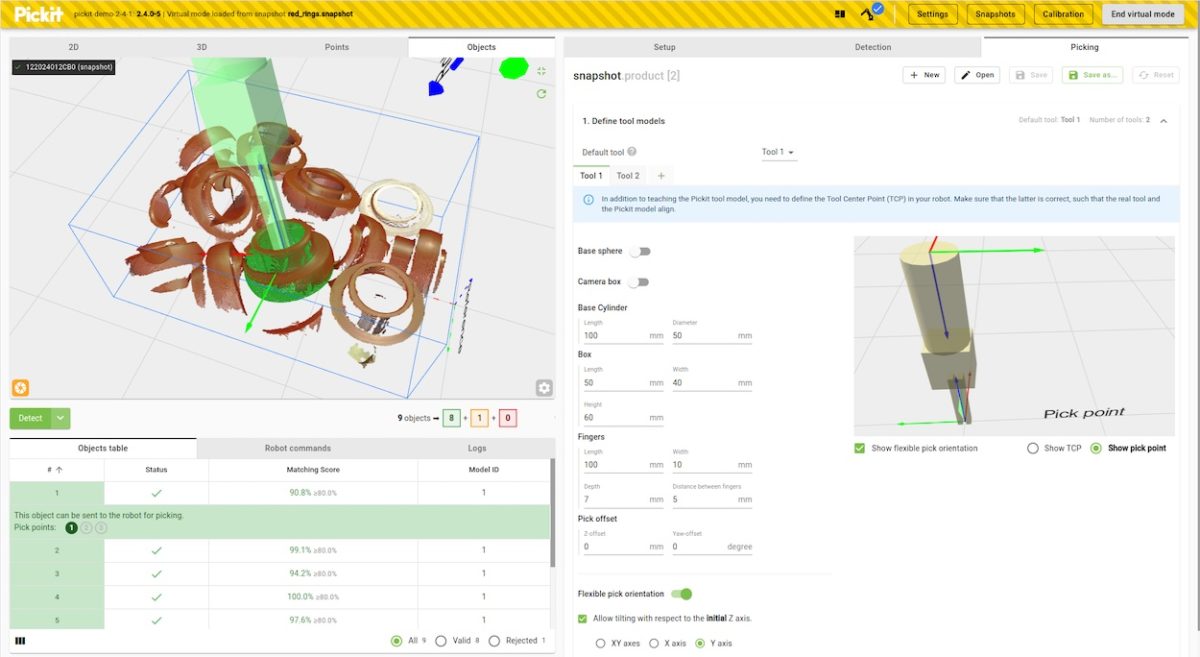
Een ander kritisch aspect van bin picking is dat het systeem voorgaande handelingen moet kunnen onthouden, om zo botsingen te vermijden. Dit is cruciaal in de farmaceutische industrie, aangezien het vaak gaat om delicate onderdelen. Onze systemen zorgen voor botsingvrij bin picken door gebruik te maken van de modeling tool technologie.
Deze technologie stelt ons in staat het robotgereedschap te modelleren. Het model van de robot tool is nuttig om visueel bevestiging te krijgen van de juiste locatie van een verzamelpunt. Daarnaast kan het ook gebruikt worden om botsingen te voorkomen tussen het gereedschap en een bak of andere voorwerpen.Een verzamelpunt geeft aan waar de robot een voorwerp kan oppakken.
Het wordt gespecificeerd als een positie en oriëntatie ten opzichte van het voorwerp, waar de robot Tool Center Point (TCP) moet bewegen om een voorwerp te kunnen opnemen. Een goed pick point is afhankelijk van zowel het grijpgereedschap, als het te picken voorwerp. In scenario’s met beperkte opnamemogelijkheden zoals bin picking, is het mogelijk om botsingen te voorkomen tussen het robotgereedschap en de bak of andere objecten.
Bij het definiëren van verzamelpunten na de objectdetectie, is het nuttig om het robotgereedschap ten opzichte van het object te visualiseren.
Om zo de juiste plaatsing van een pick-punt te kunnen bevestigen. Indien de toepassing dit vereist, is het mogelijk om meerdere gereedschapsmodellen te maken en verschillende gereedschappen toe te wijzen aan verschillende punten.
Een veelvoorkomend voorbeeld is bijvoorbeeld een grijper met twee vingers, in combinatie met verschillende openingsafstanden, afhankelijk van het geselecteerd grijppunt.
Bin picking in farma: conclusie?
De vooruitgang van visiegebaseerde technologie in bin picking verzekert dat productieprocessen met hoge kwaliteit kunnen geautomatiseerd worden door een nauwkeurige positionering, online bewaking, en real-time coördinatie.
De farmaceutische industrie heeft veel te winnen bij het automatiseren van bin picking. Net zoals andere industrieën, waaronder onder meer de lucht- en ruimtevaart, de auto- industrie en de food- en drankindustrie.
Een zo breed mogelijke kijk op machinebouw en retrofit is de beste garantie op succes. Daarom geven we in deze blog het podium aan een andere expert binnen ons brede domein.
Pickit is in 2016 ontstaan vanuit het Leuvense Intermodalics, een software-ontwikkelaar voor robotics. Pickit is een 3D-visiesoftware voor robotgrijpers. Automation engineers in meer dan 40 landen gebruiken de software om grijparmen efficiënt te laten bin picken, te depalletiseren of assemblageonderdelen te localiseren.